Robomaster Winter Camp Robot
Designed for the 2018 Robomaster Winter Camp
Early 2018
To go beyond VEX, I applied to the Robomaster Winter Camp, a robotics event that selects only 100 participants in China hosted by the world number 1 unmanned aerial vehicle company DJI. After receiving the offer, I participated in the competition in January 2018.
Introducing the 2018 Robomaster Winter Camp
The task of the 2017-2018 Robomaster(RM) Winter Camp is to hit the armor plates (the shining plate on the right) of the enemy robots to kill them. The robot can pick up a block on the field to shield one of the four armor plates. All robots are controlled in FPV mode. Each team has to design and build an entire robot except for the bullet launcher which is already given in only 5 days.

Design
Another bold plan
Robomaster is a lot more open-ended. There is simply no limit on the power and motor usage. As a result, I came up with a crazy idea. Use a high-power ducted fan to accelerate the bullet and have a wide barrel. With this, the robot can have an extremely high rate of fire. All we need to do is to just chase our enemy and fire at them. In addition, if the fan is powerful enough, it would blow away the enemy’s bullet and make us invincible. However, soon I was told that the ROF is limited to 5 shots per second and I had to give up this design.

The new design plan
Then, I changed my design focus to maximizing the bullet tank capacity because I found that in the practice match, the robot ran out of bullet quickly and was not allowed to replenish bullet during the game. The turret must have two degrees of freedom to aim. In addition, an arm and claw must be designed to catch a block to shield the armor plate from being attacked.
The base and the armor plate protection
The base design is very easy without a suspension system and I soon got the CAD complete. Each Mecanum wheel is driven by one official DJI 3508 gear motor. However, after a field test, I realized that if the armor plate is hit during a car accident, the health point would still drop. This is very undesirable because it is not guaranteed that the driver will never run the robot to the wall. To solve this problem, I have moved all the armor plates closer to the robot so that they will not be hit during a collision.

Flexible connection
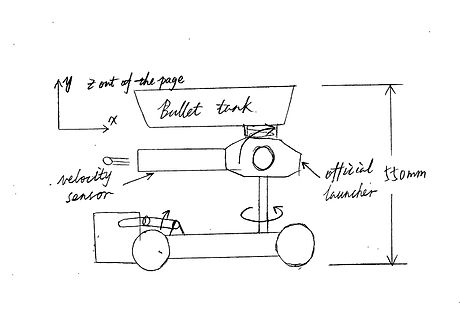
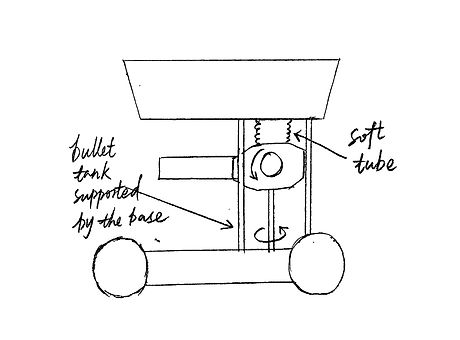
The next task is to design the turret and the tank. Since the bullet tank must be huge, it is impossible to fix it with the turret because this would produce a high load which is undesirable for the turret and a high moment of inertia which is undesirable for the stepper motor that moves the turrets. The solution I had is to fix the tank to the base and connect the turret to it with a soft tube.
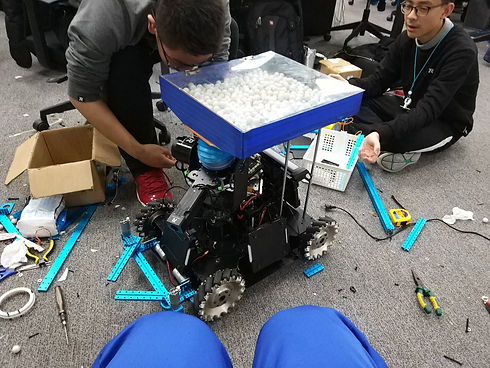
Actual turret and the bullet tank
The feeding system and the launcher are provided by the official. Therefore, it did not take me much time to finish the turret. The turret is powered by two official DJI stepper motors and it has two degrees of freedom. The bullet tank is designed by my teammate Zicheng Zhong.

Finishing the robot
The claw and the arm were finished very quickly, however, it turns out that our programmer could not finish the control code for it on time and the arm may cause the robot to turn over. As a result, I have soon taken it off and threw it away. At this stage, the robot was finished.
The product
A robot in 5 days
Actual robot
 Overview |  QQ图片20181226222640.jpg |  Shooting test |
|---|---|---|
 Waiting for the game |  Waiting for the game |
The firepower
Our award
Our robot was the one with the highest firepower and at last, it won third place in the competition with a prize of OSMO Mobile for filming use.







Retrospect
The winter camp introduced me to some new mechanisms and planar machinery designing and manufacturing. Using the machined fiberglass plate to make the base is one of the most important skills that I learned.
Although our robot is powerful, it turned over and caused us to lose in one of the games. Afterward, we found out that it is because that the robot ran over a bullet on the field and the poor shock absorption of the rigid connection caused a huge force on one side and turned over our robot. To let it not happen again, I decided that I must design a suspension system the next time.